- Accueil
- cube de manipulation
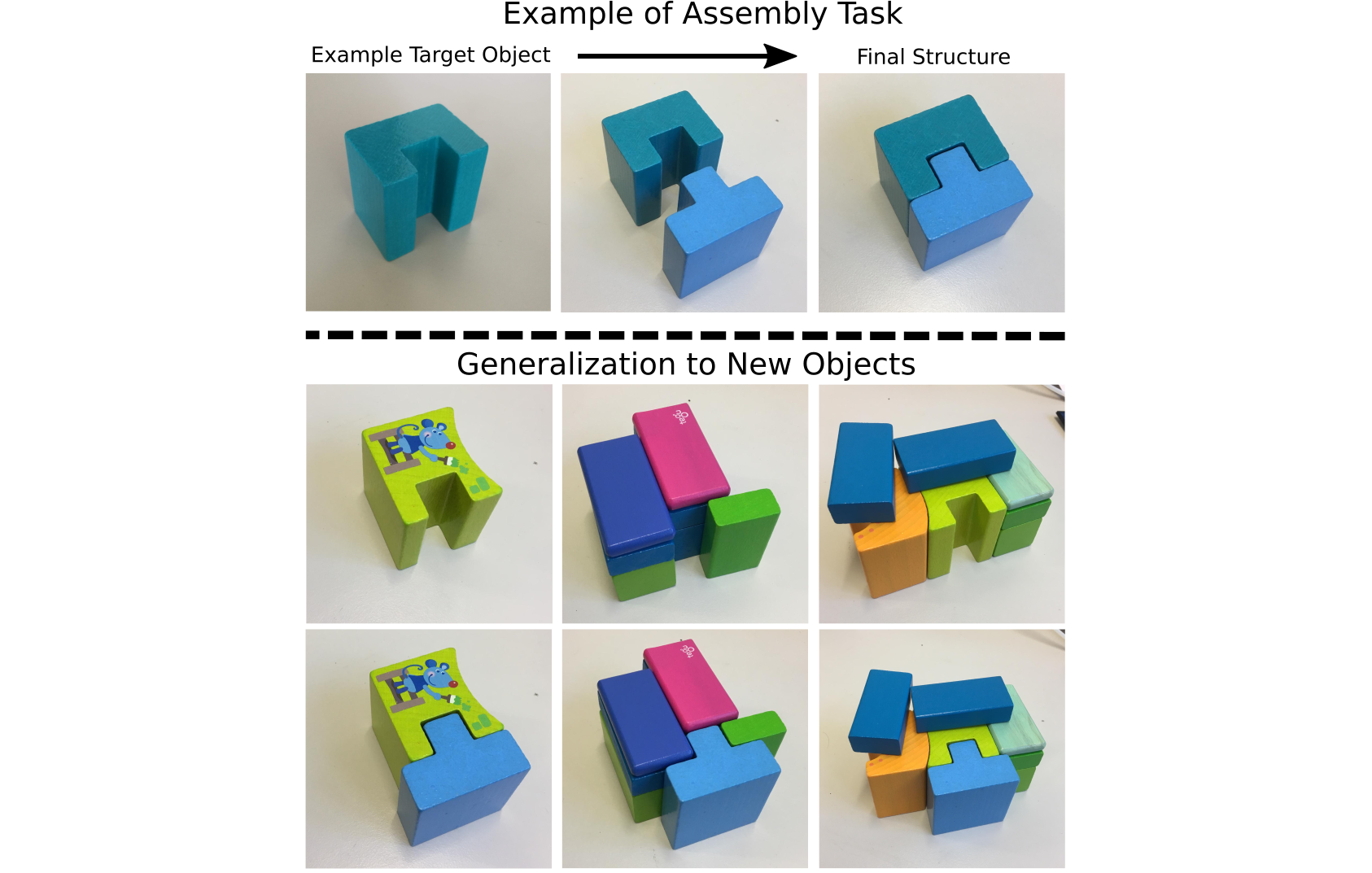
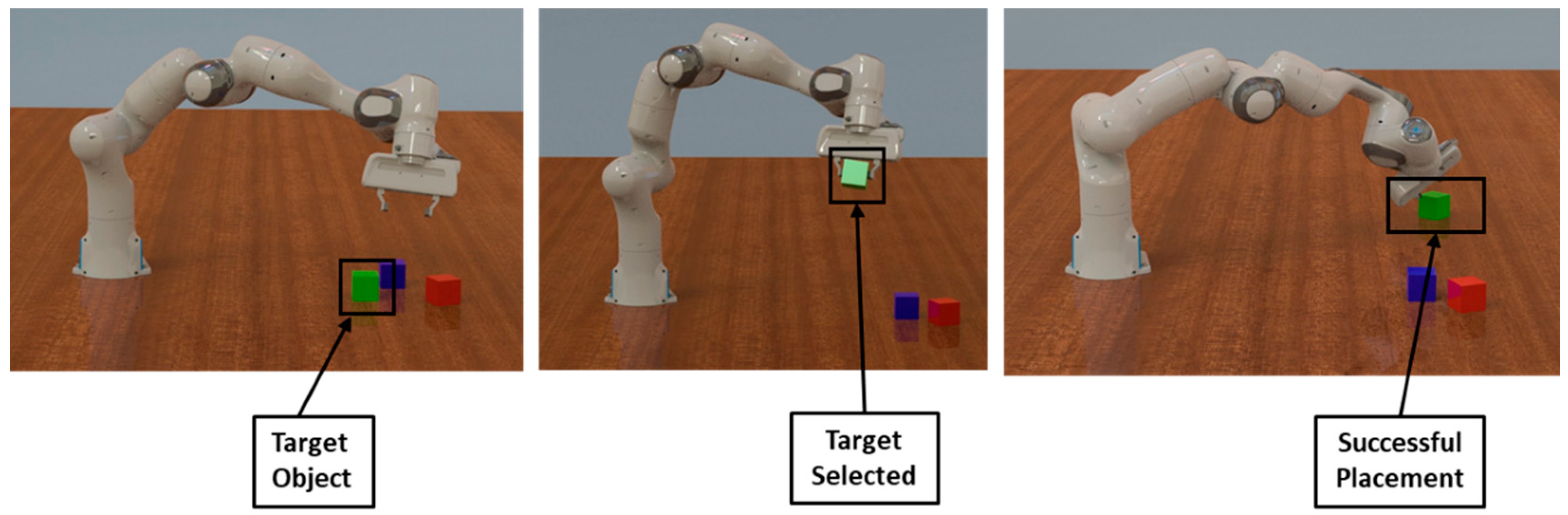
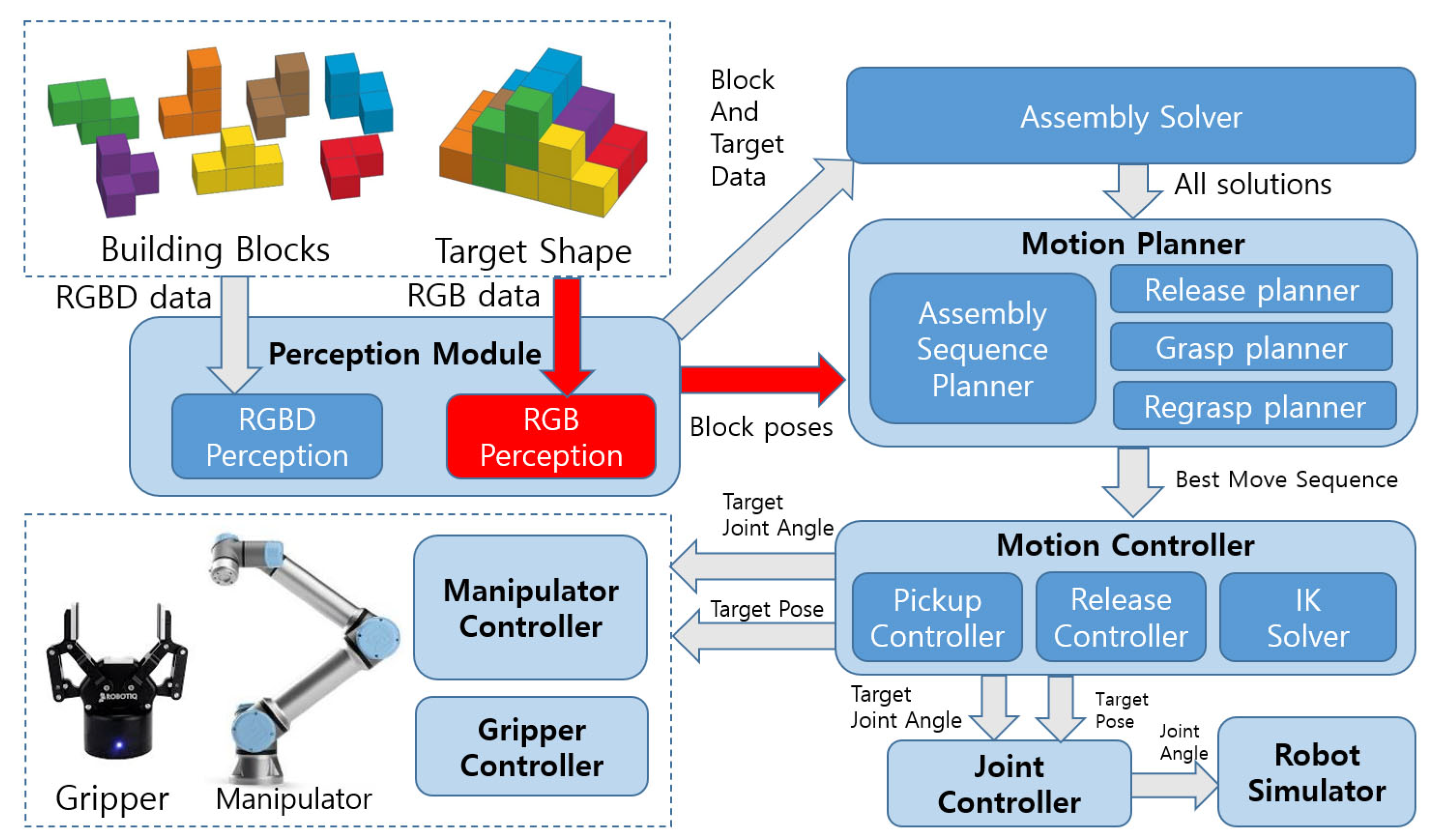
- Learning to Assemble: Estimating 6D Poses for Robotic Object-Object Manipulation
Learning to Assemble: Estimating 6D Poses for Robotic Object-Object Manipulation
4.9 (496) · € 23.99 · En Stock

Expeditious Object Pose Estimation for Autonomous Robotic Grasping

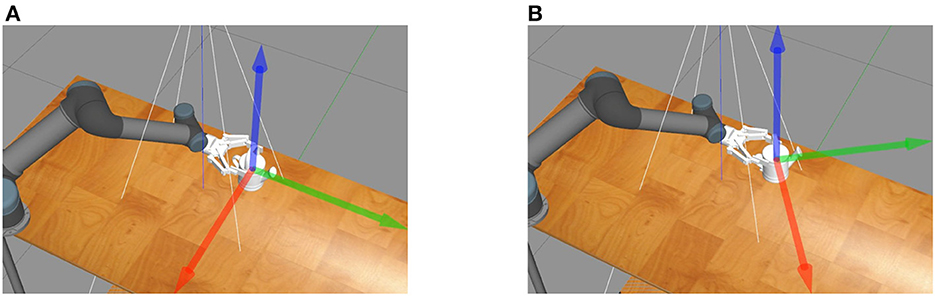
The framework of the three-stage 6D pose estimation network. (A)
Frontiers Single-Camera Multi-View 6DoF pose estimation for robotic grasping

Vision-based robotic grasping from object localization, object pose estimation to grasp estimation for parallel grippers: a review

Domain Randomization for Active Pose Estimation
Robotics, Free Full-Text

Unreal mask: one-shot multi-object class-based pose estimation for robotic manipulation using keypoints with a synthetic dataset
Reconstruction-based 6D pose estimation for robotic assembly

Expeditious Object Pose Estimation for Autonomous Robotic Grasping
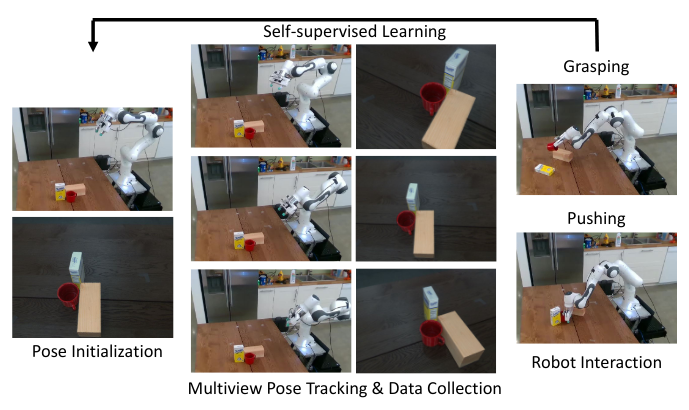
Self-supervised 6D Object Pose Estimation for Robot Manipulation
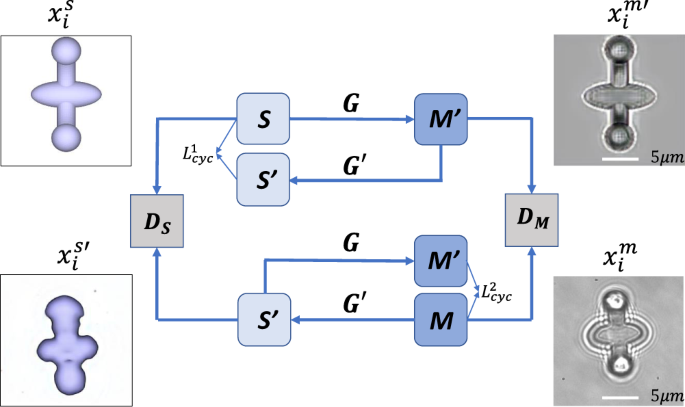
Micro-object pose estimation with sim-to-real transfer learning using small dataset
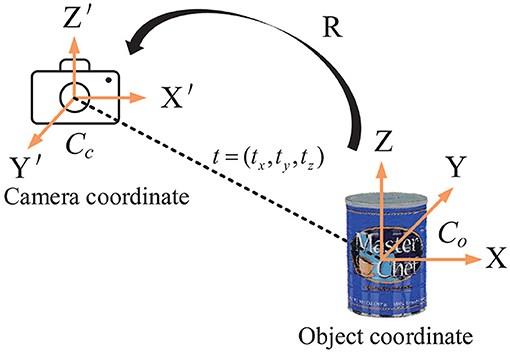
Increasing amount of efforts in literature on 6D pose estimation in

6D Pose Estimation
Applied Sciences, Free Full-Text
Frontiers A Manufacturing-Oriented Intelligent Vision System Based on Deep Neural Network for Object Recognition and 6D Pose Estimation