Link 1 down while connecting Orange PI to Pixhawk - Companion
4.6 (528) · € 39.00 · En Stock
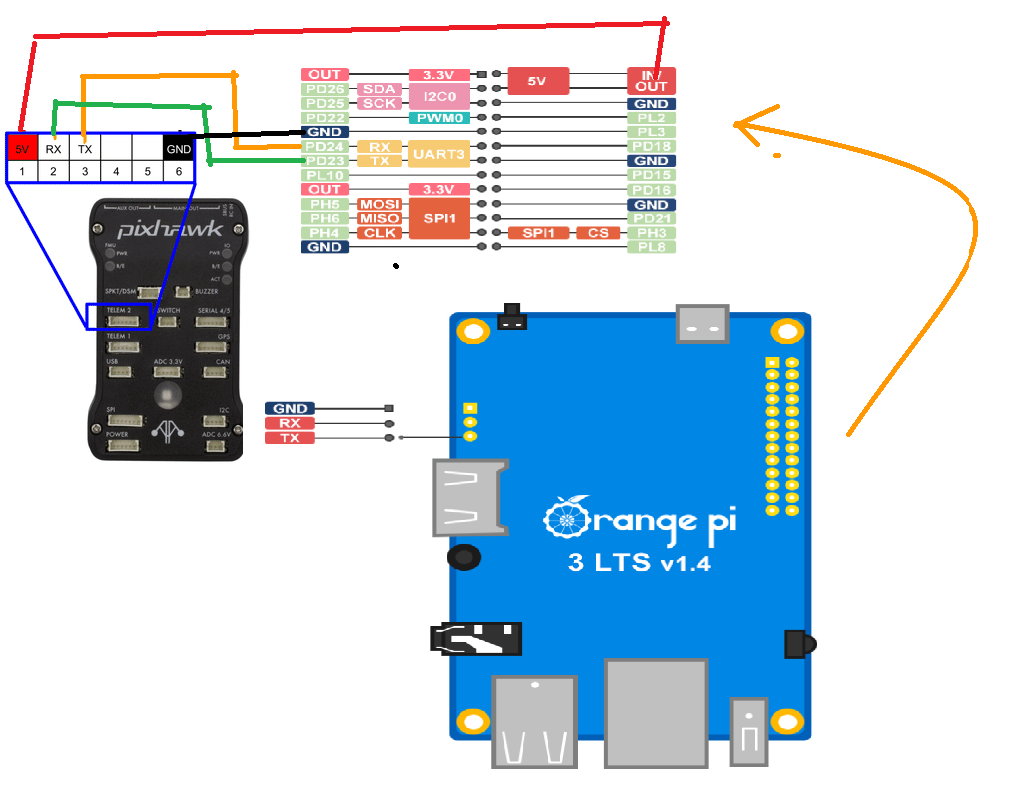
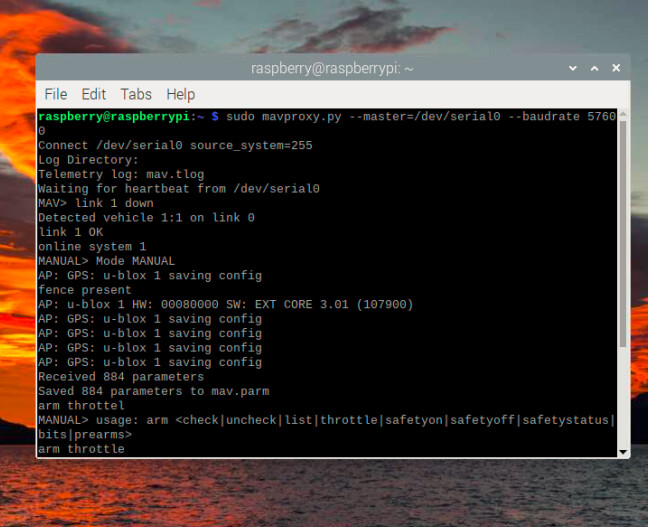
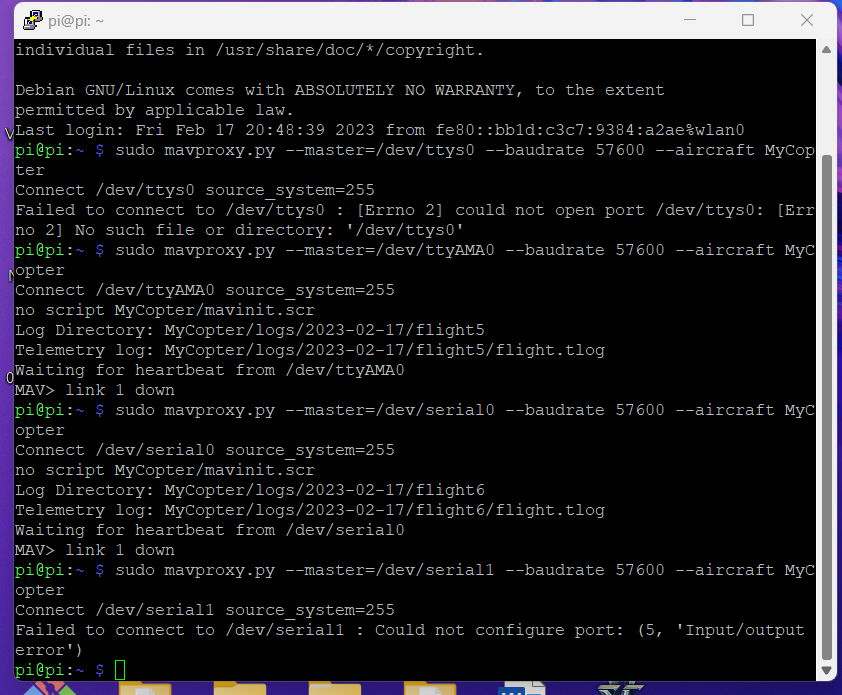
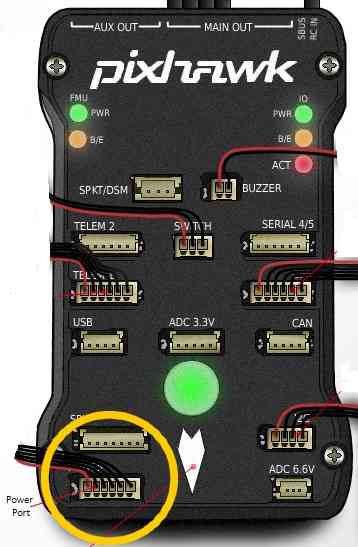
Hi everyone, I’m trying to connect my Orange PI 3 to Pixhawk with telemetry. I make the connection below: I also enable the uart from the config file according to user mauel of the Orange PI and my UART3 port is active: When I run “mavproxy.py” in the command line I’m getting the output below: Auto-detected serial ports are: /dev/ttyS0 /dev/ttyS1 /dev/ttyS2 /dev/ttyS3 /dev/ttyS4 /dev/ttyS5 Those ports are exist but only the ttyS0 and ttyS3 active. My connections are true, I even tried
Connections & Wiring Between Pixhawk 2.1 'CUBE' & Its Peripherals
How to set up my raspberry 4 to communicate with QGC? - APSync
Link 1 down while connecting Orange PI to Pixhawk - Companion

6. Install and setup mavlink-router (connecting drone to ground

MAV> link1 down, pixhawk and raspberrypi 3B - ArduCopter
Build A DIY Pi Zero Drone - Drone Dojo
MAV> link1 down, pixhawk and raspberrypi 3B - ArduCopter

A source for Pixhawk info

6. Install and setup mavlink-router (connecting drone to ground
PX4 Community Q&A: July 12, 2023 - PX4 Autopilot Coordination
X11 16 Port Chain Sync Breakout Board for HP DELTA LITE-ON Server
Help with uXRCE-DDS to serial connection - Pixhawk 6c

CubePilot The Cube Purple Set (Mini Carrier) - RobotShop
Powering the Pixhawk — Copter documentation

Waiting for the vehicle connection - QGroundControl - Blue